
Heres the first pieces. Turtle frame, fanless linux box.




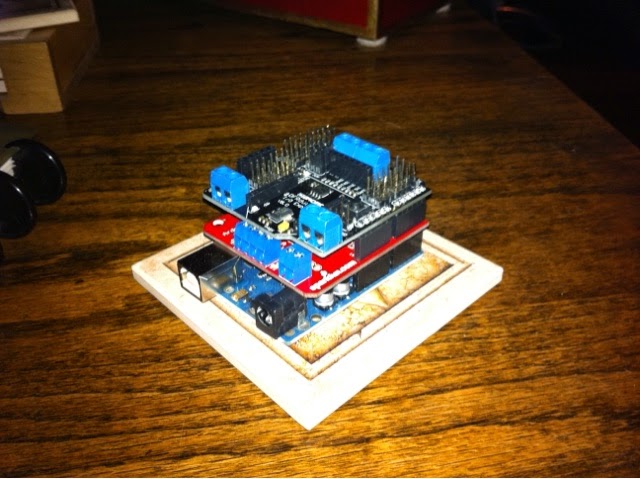
Built up the base controller. Arduino uno and motor control board. Also power regulators.
Set up two sla batts and power distribution and monitoring. One batt is for the computer.


Next, linux mint and the Kinect!

Then some sonar and ir

Build up, add wireless kb and touchscreen.

Added encoder w some actbotics hw.

More buildout.


360 planar lidar. Interface built using Processing.



So, now to teach him to follow, seek, and do. SLAM. Oh yea, he has a parallax laser rangefinder and a compass. Obviously wifi, vnc.

No comments:
Post a Comment