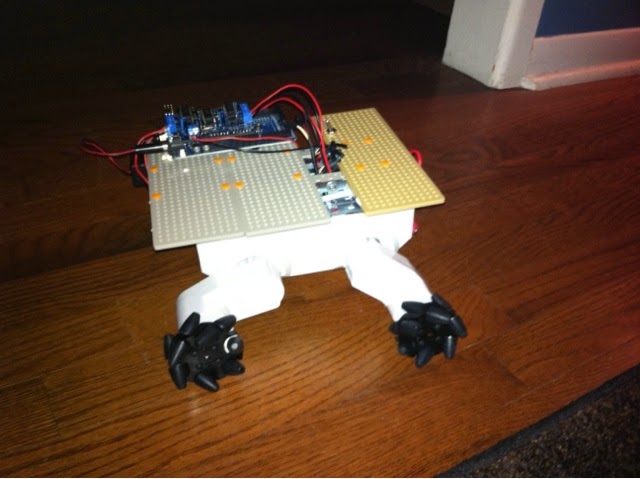
Started with good old rover base.
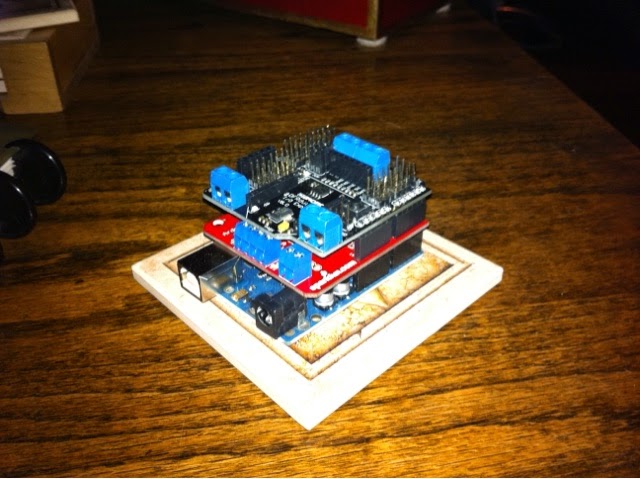
Mega and motor controller
Then switched to omniwheels. Can move in any direction, rotating all the while, if you like.
Sonar on a servo.
And bluetooth. Really nice autonomous open path seeker. Can be commanded via bluetooth as well.